Алгоритмы - Разработка и применение - 2016 год
Взвешенное интервальное планирование: рекурсивная процедура - Динамическое программирование
Наше изучение алгоритмических методов началось с жадных алгоритмов, которые в определенном смысле представляют наиболее естественный подход к разработке алгоритма. Как вы видели, столкнувшись с новой вычислительной задачей, иногда можно легко предложить для нее несколько возможных жадных алгоритмов; проблема в том, чтобы определить, дают ли какие-либо из этих алгоритмов верное решение задачи во всех случаях.
Все задачи из главы 4 объединял тот факт, что в конечном итоге действительно находился работающий жадный алгоритм. К сожалению, так бывает далеко не всегда; для большинства задач настоящие трудности возникают не с выбором правильной жадной стратегии из несколько вариантов, а с тем, что естественного жадного алгоритма для задачи вообще не существует. В таких случаях важно иметь наготове другие методы. Принцип “разделяй и властвуй” иногда выручает, однако реализации этого принципа, которые мы видели в предыдущей главе, часто недостаточно эффективны для сокращения экспоненциального поиска “грубой силой” до полиномиального времени. Как было замечено в главе 5, его применения чаще позволяют сократить излишне высокое, но уже полиномиальное время выполнения до более быстрого.
В этой главе мы обратимся к более мощному и нетривиальному методу разработки алгоритмов — динамическому программированию. Охарактеризовать динамическое программирование будет проще после того, как вы увидите его в действии, но основная идея базируется на интуитивных представлениях, лежащих в основе принципа “разделяй и властвуй”, и по сути противоположна жадной стратегии: алгоритм неявно исследует пространство всех возможных решений, раскладывает задачу на серии подзадач, а затем строит правильные решения подзадач все большего размера. В некотором смысле динамическое программирование может рассматриваться как метод, работающий в опасной близости от границ перебора “грубой силой”: хотя оно систематически прорабатывает большой набор возможных решений задачи, это делается без явной проверки всех вариантов. Именно из-за этой необходимости тщательного выдерживания баланса динамическое программирование бывает трудно освоить; как правило, вы начинаете чувствовать себя уверенно только после накопления немалого практического опыта.
Помня об этом, мы рассмотрим первый пример динамического программирования: задачу взвешенного интервального планирования, определение которой приводилось в разделе 1.2. Разработка алгоритма динамического программирования для этой задачи будет проводиться в два этапа: сначала как рекурсивная процедура, которая сильно напоминает поиск “грубой силой”, а затем, после переосмысления этой процедуры, — как итеративный алгоритм, который строит решения последовательно увеличивающихся подзадач.
6.1. Взвешенное интервальное планирование: рекурсивная процедура
Мы уже видели, что жадный алгоритм обеспечивает оптимальное решение задачи интервального планирования, целью которой является получение множества неперекрывающихся интервалов максимально возможного размера. Задача взвешенного интервального планирования имеет более общий характер: с каждым интервалом связывается определенное значение (вес), а решением задачи считается множество с максимальным суммарным весом.
Разработка рекурсивного алгоритма
Поскольку исходная задача интервального планирования представляет собой частный случай, в котором все веса равны 1, мы уже знаем, что большинство жадных алгоритмов не обеспечивает оптимального решения. Но даже алгоритм, который работал ранее (многократный выбор интервала, завершающегося раньше всех), в этой ситуации уже не является оптимальным, как показывает простой пример на рис. 6.1.
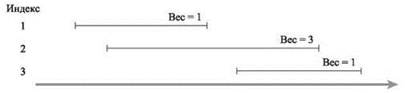
Рис. 6.1. Простой пример задачи взвешенного интервального планирования
Действительно, естественный жадный алгоритм для этой задачи неизвестен, что заставляет нас переключиться на динамическое программирование. Как упоминалось ранее, знакомство с динамическим программированием начнется с рекурсивного алгоритма, а затем в следующем разделе мы перейдем на итеративный метод, более близкий по духу к алгоритмам оставшейся части этой главы.
Воспользуемся определениями, приведенными в формулировке задачи интервального планирования из раздела 1.2. Имеются n заявок с пометками 1, ..., n; для каждой заявки i указывается начальное время si и конечное время fi. С каждым интервалом i связывается некоторое значение — вес vi. Два интервала называются совместимыми, если они не перекрываются. Целью текущей задачи является нахождение подмножества S ⊆ {1, n} взаимно совместимых интервалов, максимизирующего сумму весов выбранных интервалов ![]()
Предположим, заявки отсортированы в порядке неубывания конечного времени: f1 ≤ f2 ≤ ... ≤ fn. Заявка i называется предшествующей заявке j, если i < j. Таким образом определяется естественный порядок “слева направо”, в котором будут рассматриваться интервалы. Чтобы было удобнее обсуждать этот порядок, определим p(j) для интервала j как наибольший индекс i < j, при котором интервалы i и j не перекрываются. Другими словами, i — крайний левый интервал, который завершается до начала j. Определим p(j) = 0, если не существует заявки i < j, не перекрывающейся с j. Пример определения p( j) изображен на рис. 6.2.

Рис. 6.2. Задача взвешенного интервального планирования с функциями p(j), определенными для каждого интервала j
Допустим, у нас имеется экземпляр задачи взвешенного интервального планирования; рассмотрим оптимальное решение O, временно забыв о том, что нам о нем ничего не известно. Есть нечто совершенно очевидное, что можно утверждать о решении O: либо интервал n (последний) принадлежит O, либо нет. Попробуем исследовать обе стороны этой дихотомии. Если n ∈ O, то очевидно, ни один интервал, индексируемый строго между p(n) и n, не может принадлежать O, потому что по определению p(n) мы знаем, что интервалы p(n) + 1, p(n) + 2, ..., n - 1 — все они перекрывают интервал n. Более того, если n ∈ O, то решение O должно включать оптимальное решение задачи, состоящей из заявок {1, ..., p(n)}, потому что в противном случае выбор заявок O из {1, ..., p(n)} можно было бы заменить лучшим выбором без риска перекрытия заявки n.
С другой стороны, если n $ O, то O просто совпадает с оптимальным решением задачи, состоящей из заявок {1, ..., n - 1}. Рассуждения полностью аналогичны: предположим, что O не включает заявку n; если оно не выбирает оптимальное множество заявок из {1, ..., n - 1}, то его можно заменить лучшим выбором.
Все это наводит на мысль, что в процессе поиска оптимального решения для интервалов {1, 2, ..., n} будет производиться поиск оптимальных решений меньших задач в форме {1, 2, ..., j}. Пусть для каждого значения j от 1 до n оптимальное решение задачи, состоящей из заявок {1, ..., j}, обозначается O, а значение (суммарный вес) этого решения — OPT(j). (Также мы определим OPT(0) = 0 как оптимум по пустому множеству интервалов.) Искомое оптимальное решение представляет собой Оn со значением OPT(n). Для оптимального решения Оj по интервалам {1, 2, ..., j} из приведенных выше рассуждений (обобщенных для j = n) следует, что либо j ∈ Оj, и тогда OPT(j) = vj + OPT(p(j)), либо j $ Оj, и тогда OPT(j) = OPT(j - 1). Так как других вариантов быть не может (j ∈ Оj или j ∈ Оj), можно утверждать, что
(6.1) OPT(j) = max(vj+ OPT(p(j)), OPT(j - 1)).
Как решить, принадлежит ли п оптимальному решению Оj? Это тоже несложно: n принадлежит оптимальному решению в том и только в том случае, если первый из упомянутых выше вариантов по крайней мере не хуже второго; другими словами,
(6.2) Заявка j принадлежит оптимальному решению для множества {1, 2, ..., j} в том и только в том случае, если
v + OPT(p(j)) ≥ OPT(j - 1).
Эти факты образуют первый важнейший компонент, на котором базируется решение методом динамического программирования: рекуррентное уравнение, которое выражает оптимальное решение (или его значение) в контексте оптимальных решений меньших подзадач.
Несмотря на простые рассуждения, которые привели нас к этому заключению, утверждение (6.1) само по себе является существенным достижением. Оно напрямую предоставляет рекурсивный алгоритм для вычисления OPT(n) при условии, что заявки уже отсортированы по времени завершения и для каждого j вычислены значения p(j).
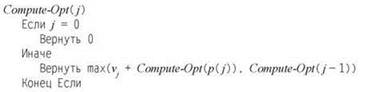
Правильность алгоритма напрямую доказывается индукцией по j :
(6.3) Compute-Opt(j) правильно вычисляет OPT(j) для всех j = 1, 2, ..., n.
Доказательство. По определению OPT(0) = 0. Теперь возьмем некоторое значение
j > 0 и предположим, что Compute-Opt(i) правильно вычисляет OPT(i) для всех i < j. Из индукционной гипотезы следует, что Compute-Opt(р(j)) = OPT(р(j)) и Compute-Opt(j - 1) = OPT( j - 1); следовательно, из (6.1)
![]()
К сожалению, если реализовать алгоритм Compute-Opt в этом виде, его выполнение в худшем случае займет экспоненциальное время. Например, на рис. 6.3 изображено дерево вызовов для экземпляра задачи на рис. 6.2: оно очень быстро расширяется из-за рекурсивного ветвления. Или более экстремальный пример: в системе с частым наслоением наподобие изображенной на рис. 6.4, где p(j) = j - 2 для всех j = 2, 3, 4, ..., n, мы видим, что Compute-Opt(j) генерирует раздельные рекурсивные вызовы для задач с размерами j - 1 и j - 2. Другими словами, общее количество вызовов Compute-Opt в этой задаче будет расти в темпе чисел Фибоначчи, что означает экспоненциальный рост. Таким образом, решение с полиномиальным временем так и остается нереализованным.

Рис. 6.3. Дерево подзадач, вызываемых Compute-Opt, для экземпляра задачи на рис. 6.2
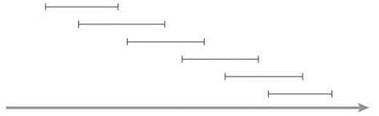
Рис. 6.4. Экземпляр задачи взвешенного интервального планирования, для которого простая рекурсия Compute-Opt занимает экспоненциальное время. Веса интервалов в этом примере равны 1
Мемоизация рекурсии
Вообще говоря, до алгоритма с полиномиальным временем не так уж далеко. Фундаментальный факт, который становится вторым критическим компонентом решения методом динамического программирования, заключается в том, что наш рекурсивный алгоритм Compute-Opt в действительности решает n + 1 разных подзадач: Compute-Opt(0), Compute-Opt(1), ..., Compute-Opt(n). Тот факт, что он выполняется за экспоненциальное время, приведен просто из-за впечатляющей избыточности количества выдач каждого из этих вызовов.
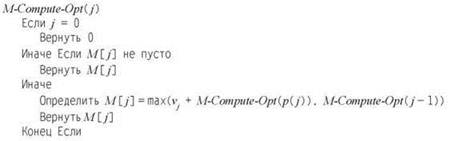
Как устранить всю эту избыточность? Можно сохранить значение Compute-Opt в глобально-доступном месте при первом вычислении и затем просто использовать заранее вычисленное значение вместо всех будущих рекурсивных вызовов. Метод сохранения ранее вычисленных значений называется мемоизацией(memoization).
Описанная стратегия будет реализована в более “умной” процедуре M-Compute-Opt. Процедура использует массив M[0... n]; элемент M[j] изначально содержит “пустое” значение, но принимает значение Compute-Opt(j) после первого вычисления. Чтобы определить OPT(n), мы вызываем M-Compute-Opt(n).
Анализ мемоизированной версии
Конечно, этот алгоритм очень похож на предыдущую реализацию; однако мемоизация позволяет сократить время выполнения.
(6.4) Время выполнения M-Compute-Opt(n) равно O(n) (предполагается, что входные интервалы отсортированы по конечному времени).
Доказательство. Время, потраченное на один вызов M-Compute-Opt, равно O(1) без учета времени, потраченного в порожденных им рекурсивных вызовах. Таким образом, время выполнения ограничивается константой, умноженной на количество вызовов M-Compute-Opt. Так как сама реализация не предоставляет явной верхней границы для количества вызовов, для получения границы мы попытаемся найти хорошую метрику “прогресса”.
Самой полезной метрикой прогресса является количество “непустых” элементов M. В исходном состоянии оно равно 0; но при каждом переходе на новый уровень с выдачей двух рекурсивных вызовов M-Compute-Opt заполняется новый элемент, а следовательно, количество заполненных элементов увеличивается на 1. Так как M содержит только n + 1 элемент, из этого следует, что количество вызовов M-Compute-Opt не превышает O(n), а следовательно, время выполнения M-Compute-Opt(n) равно O(n), как и требовалось. ■
Вычисление решения помимо его значения
Пока что мы вычислили только значение оптимального решения; вероятно, также желательно получить полный оптимальный набор интервалов. Алгоритм M-Compute-Opt легко расширяется для отслеживания оптимального решения: можно создать дополнительный массив S, в элементе S[i] которого хранится оптимальное множество интервалов из {1, 2, ..., i}. Однако наивное расширение кода для сохранения решений в массиве S увеличит время выполнения с дополнительным множителем O(n): хотя позиция в массиве M может обновляться за время O(1), запись множества в массив S занимает время O(n). Чтобы избежать возрастания O(n), вместо явного хранения S можно восстановить оптимальное решение по значениям, хранящимся в массиве Mпосле вычисления оптимального значения.
Из (6.2) известно, что j принадлежит оптимальному решению для множества интервалов {1, ..., j} в том, и только в том случае, если vj + OPT(p(j)) ≥ OPT(j - 1). Воспользовавшись этим фактом, получаем простую процедуру, которая “проходит в обратном направлении” по массиву M, чтобы найти множество интервалов оптимального решения.

Поскольку Find-Solution рекурсивно вызывает себя только для строго меньших значений, всего делается O(n) рекурсивных вызовов; а так как на один вызов тратится постоянное время, имеем
(6.5) Для массива M с оптимальными значениями подзадач Find-Solution возвращает оптимальное решение за время O(n).